
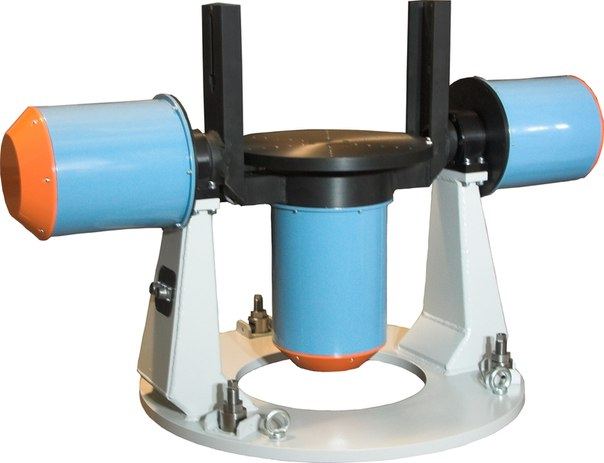
Inertial System Test Instruments
Designed for testing and calibration of various inertial sensors
(fiber-optic gyros, ring-laser gyros, accelerometers,
MEMS-gyros and -accelerometers) and
inertial navigation systems based on such sensors
 |
 |
 |
 |
|||||
| Table Performance | 1-axis rate table |
2-axis rate table |
3-axis rate table |
|||||
|---|---|---|---|---|---|---|---|---|
| Mechanical | ||||||||
| Angular freedom | continuous | continuous | continuous | |||||
| Orthogonality, arc sec | - | ±15 | ±15 | |||||
| Rate | rotating axis |
|
|
|||||
| Range, deg/ sec | Up to ±1500 | Up to ±360 | Up to ±360 | |||||
| Stability over 360 °, % | 0,005 | 0,005 | 0,005 | |||||
| Accuracy, % | 0,005 | 0,005 | 0,005 | |||||
| Command Resolution, deg/ sec | 0,01 | |||||||
| Position | rotating axis |
|
|
|||||
| Accuracy, arc sec | 2 | 2 | 2 | |||||
| Command Resolution, deg | 0,01 | |||||||
| Dimensions | ||||||||
| Payload max, kg | Up to 50 | Up to 50 | Up to 50 | |||||
| Table top diameter, mm | Up to 500 | Up to 500 | Up to 500 | |||||
| Computer Interfaces | ||||||||
| USB, Ethernet | ||||||||

Provided software allows to
- perform user-defined turning and rotation sequences, making the calibration process as automated as possible
- show current angular position and rotation speed in real-time mode
- simulate rolling and pitching oscillations of the ship or vehicle on which the tested equipment will be installed
Technical specifications can be changed upon customer's request